TeamViewer Spatial Referenzen helfen dabei, festzulegen, wie Modelle in der Spatial-Workplace-App angezeigt werden. Durch das Hinzufügen einer Raumreferenz zu Ihrem Workflow stellen Sie sicher, dass das Modell an der richtigen Position in Spatial Workplace erscheint. Ohne Spatial Referenz öffnet sich das Modell in der standardmäßigen 3D-Ansicht.
Es gibt drei Arten von Raumreferenzen:
-
Marker
-
Objekt-Tracker
-
Modellplatzierung
Hinweis: Das Mischen verschiedener Spatial Referenztypen in einem Workflow wird derzeit nicht unterstützt.
Markers
Ein Marker dient dazu, Informationen, die innerhalb eines Workflows angezeigt werden sollen, an der gewünschten Stelle über dem realen Bauteil zu positionieren. Dazu muss mindestens ein virtueller Marker im Editor hinzugefügt werden, an dem sich der reale Marker in Bezug auf die reale Komponente befindet. Unterschiedliche Geräte verwenden unterschiedliche Arten von Markern. Das virtuelle Modell wird dann entsprechend der gescannten Position des Markers in Spatial Workplace geladen.
Aktuell wird lediglich ein Marker unterstützt:
- ArUco Marker: Diese Art von Marker ist für die Verwendung mit mobilen Geräten (iOS und Android) gedacht. Die Größe des Markers kann vom Benutzer angepasst werden und kann zwischen 1 und 99 cm liegen. Als Faustregel gilt, dass Marker mit einer Größe von 10 cm (12 cm mit Rändern) oder 15 cm (18 cm mit Rändern) verwendet werden sollten, wobei der Anwender die Möglichkeit hat, die Größe zu wählen, die am besten zum jeweiligen Bauteil passt.
So fügen Sie Ihrem Modell einen Marker hinzu:
- Klicken Sie oben auf Add.
- Wählen Sie je nach Ihren Anforderungen entweder ArUco oder QR code marker.
- Klicken Sie auf die Oberfläche des Modells, an der Sie es platzieren möchten. Die anderen Optionen/Schaltflächen des Editors sind deaktiviert, bis Sie den Marker setzen.
- Um die Position des Markers auf der Oberfläche des Modells zu ändern, wählen Sie ihn aus und klicken Sie im oberen Menü auf Object > Snap oder drücken Sie
Sauf der Tastatur. - Ändern Sie die Position und Drehung von Markern unabhängig von der Oberfläche des Modells, indem Sie die Transformation Gizmos oder das Menü Transform auf der rechten Seite verwenden.
6. Auf der rechten Seite können Sie die Referenz des Markers (ID und Größe) bearbeiten.
Hinweis: Die virtuelle Markierung, die im Editor verwendet wird, muss mit der realen Markierung übereinstimmen, die bei der Verwendung von Spatial Workplace auf der realen Komponente platziert wird, also stellen Sie sicher, dass die Markierungs-ID übereinstimmt. Es ist wichtig, den richtigen Marker zu drucken und ihn sowohl virtuell im Editor als auch auf dem realen Baustein an der gleichen Stelle zu platzieren.
Der Marker kann heruntergeladen werden, indem Sie im oberen Menü auf Marker-PDF klicken.
Object Tracker
Bei der Verwendung von Object Trackern wird anhand des realen Objekts die Position der Informationen berechnet, die innerhalb eines Workflows an der gewünschten Stelle angezeigt werden sollen. Object Tracker können in Workflows verwendet werden, die auf iOS- und Android-Geräten angezeigt werden.
So fügen Sie Ihrem Modell einen Object Tracker hinzu:
1. Klicken Sie im Menü oben in der 3D-Szene auf Add > Object Tracker .
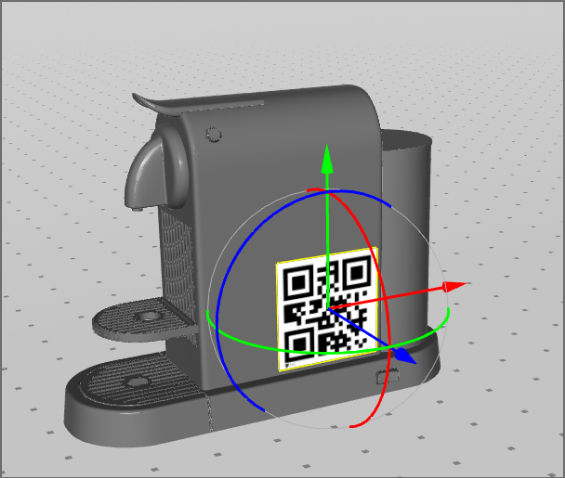
2. Sie sehen ein rotes Hologramm einer Datenbrille (Sie müssen mit dem Scrollrad Ihrer Maus herauszoomen). Dieses Hologramm zeigt, wie das Objekt durch die Smart Glasses wahrgenommen wird.
3. Die Position des Objekt-Trackers in Bezug auf das Modell in der Szene stellt die Position und Entfernung dar, in der der Benutzer sein Gerät positionieren muss, um das reale Objekt zu scannen, während der Workflow in Spatial Workplace ausgeführt wird.
4. Fügen Sie den Objekt-Tracker hinzu. Er wird nun automatisch an der Position der 3D-Szenenkamera platziert (d. h. in der Perspektive, aus der der Benutzer das Modell aktuell in der 3D-Szene betrachtet).
Hinweis: Mit der Maus kann der Benutzer die Szene drehen, um sie aus verschiedenen Perspektiven besser zu betrachten.
5. Verwenden Sie das Gizmo über dem Objekt-Tracker, um seine Positionen zu verfeinern oder die Kamera zu verschieben.
6. Optional: Klicken Sie im Menü auf der rechten Seite auf Transformation aus Ansicht übernehmen, um ihn erneut auf Ihre aktuelle Betrachtungsperspektive zu setzen.
Hinweis: Es ist wichtig, dass sich der Objekt-Tracker in einem angemessenen Abstand zum Modell befindet und dass die Linie, die von ihm ausgeht, auf das Modell zeigt.
⇒ Laden Sie anschließend Ihren Workflow hoch, testen Sie die Scan-Perspektive und den Abstand auf einem Anzeigegerät und verfeinern Sie diese im Editor. Damit wird garantiert, dass der Endbenutzer eine bessere Scan-Erfahrung hat.
Hinweis: Die rote Farbe des Hologramms der Datenbrille bedeutet, dass keine .obj Datei angehängt ist. Die .obj Datei unterstützt die Objektverfolgung von VisionLib, um die reale Komponente zu verfolgen.
7. Um eine .obj Datei aus der Szene zu erstellen, wählen Sie das rote Hologramm aus
8. Gehen Sie zu den Einstellungen auf der rechten Seite.
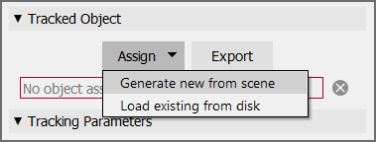
9. Klicken Sie unter Tracked Object auf Assign > Generate new from scene
10. Optional: Der Benutzer kann die .obj Datei auch auf seinem Computer speichern, indem er auf Export klickt und die Datei speichert.
Hinweis: Unabhängig vom Modellformat, das in den Spatial Editor importiert wird, muss eine .obj Datei aus der Scene generiert oder von der Festplatte bereitgestellt werden.
Nun sollte das Hologramm des Object Trackers in der 3D-Szene seine Farbe auf grün ändern.
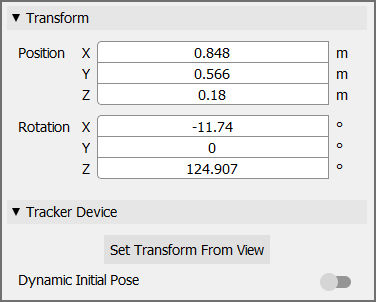
11. Optional: Wenn Teile in Spatial ausgeblendet oder aus dem Modell verschoben werden, muss die .obj Datei neu generiert werden, um diese Änderungen in Ihren Arbeitsablauf einzubeziehen. Um die Position und Drehung des anfänglichen Trackings bei Verwendung der Workplace-App anpassen zu können, aktivieren Sie die Option Dynamic Initial Pose
12. Ändern Sie die Position und Drehung des Objekt-Trackers über das Menü auf der rechten Seite.
13. Klicken Sie auf Set Transform From View. Der Object-Tracker wird automatisch an die Position und den Blickwinkel der 3D-Szene verschoben.
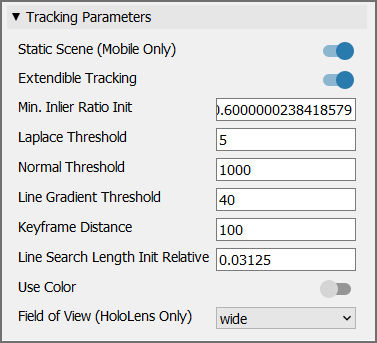
14. Schließlich können Sie die Werte der Tracking-Parameter (siehe unten) ändern, um die Nachverfolgung für ein bestimmtes Objekt zu verbessern.
Hinweis: Einer dieser Parameter ist die Static Scene, die der Benutzer deaktivieren kann, wenn die Szene, mit der er arbeitet, dynamisch ist. Diese Funktion ist derzeit nur auf Mobilgeräten verfügbar.
Hinweis: Die Standardwerte sind allgemeine Parameter, die so gewählt wurden, dass sie mit den meisten Objekten gut funktionieren.
Liste aller verfügbaren Tracking-Parameter
-
Dynamische Initialpose: Wenn aktiviert, kann der Benutzer während der Laufzeit den anfänglichen Tracking-Blickwinkel dynamisch festlegen.
-
Kontinuierliches Tracking (nur Mobilgeräte): Wenn aktiviert (Standard), wird das Objekt auf mobilen Geräten kontinuierlich getrackt. Geeignet für Objekte, die während der Aufgabe bewegt oder gedreht werden können, aber ihre Form beibehalten. Nicht-kontinuierliches Tracking erfasst das Objekt nur zu Beginn der Aufgabe und setzt das Tracking anschließend mit SLAM fort. Dieses Verfahren ist besser für Objekte geeignet, die nicht bewegt oder gedreht werden, deren Form sich aber verändert (z. B. Teile werden hinzugefügt oder entfernt).
-
Erweiterbares Tracking: Wenn aktiviert (Standard), wird das modellbasierte Tracking durch SLAM-basiertes Tracking ergänzt. Dadurch kann das Tracking fortgeführt werden, auch wenn das Modell im Kamerabild nicht mehr sichtbar ist. Der Benutzer muss hierfür einen „SLAM-Tanz“ durchführen, d. h. die Kamera durch Bewegen und Drehen so einsetzen, dass genügend Basislinie für die Merkmalserkennung vorhanden ist.
-
Min. Inlier Ratio Init: Schwellwert für die Validierung des Trackings während der Initialisierung. Wertebereich: 0,5–0,9, Standardwert 0,6. Höhere Werte sind empfehlenswert, wenn das Linienmodell das reale Objekt perfekt ohne Verdeckung abbildet. Da dies meist nicht der Fall ist, funktioniert ein niedrigerer Wert oft besser.
-
Laplace-Schwelle: Schwellwert für die Erstellung des Linienmodells (in mm). Wertebereich: 0,0001–100000, Standardwert 5. Gibt die minimale Tiefe zwischen zwei benachbarten Pixeln an, die als Kante erkannt wird.
-
Normal-Schwelle: Schwellwert für die Generierung des Linienmodells. Wertebereich: 0,0001–1000, Standardwert 1000. Gibt den minimalen Normalenunterschied zwischen benachbarten Pixeln an, der zur Erkennung als Kante erforderlich ist. Normalbasierte Linien sind meist unzuverlässig, daher wird üblicherweise ein hoher Wert verwendet. In bestimmten Fällen kann ein niedrigerer Wert sinnvoll sein.
-
Linien-Gradienten-Schwelle: Schwellwert für Kantenkandidaten im Bild. Wertebereich: 0–256, Standardwert 40. Hohe Werte berücksichtigen nur Pixel mit hohem Kontrast, niedrige Werte auch Pixel mit geringerem Kontrast. Hier besteht ein Kompromiss: Zu viele Kandidaten erhöhen das Risiko falscher Pixelwahl, zu wenige verhindern, dass das Linienmodell am Objekt haften bleibt.
-
Keyframe-Abstand: Minimaler Abstand zwischen Keyframes (in mm). Wertebereich: 0,001–100000, Standardwert 100. Das Linienmodell wird nur für bestimmte Keyframes generiert. Höhere Werte verbessern die Leistung, reduzieren aber die Genauigkeit (und umgekehrt).
-
Linien-Suchlänge Init Relativ: Länge der orthogonalen Suchlinien (in Prozent) relativ zur minimalen Auflösung während Initialisierung und Tracking. Wertebereich: 0,00625–1, Standardwert 0,03125. Der modellbasierte Tracker projiziert das 3D-Linienmodell ins Kamerabild und sucht orthogonal zu den projizierten Linien nach Kantenpixeln.
-
Farbe verwenden: Standardmäßig deaktiviert. Wenn aktiviert, werden farbige Kanten beim Tracking besser unterschieden. Nützlich für Objekte mit farbigen Kanten. Kann die Tracking-Qualität erhöhen, erfordert jedoch mehr Rechenleistung.
Hinweis: Objekt-Tracking muss von TeamViewer aktiviert werden. Zusätzlich ist eine gesonderte Lizenzierung pro Modell oder pro Gerät erforderlich (externer Softwareanbieter – VisionLib).
Model Placement
Beim Model placement wird die Benutzerposition beim Start von Spatial Workplace verwendet, um alle Modelle und Pins zu positionieren, die mit der Spatial Referenz verbunden sind.
Es kann in Workflows verwendet werden, die auf iOS- und Android-Geräten angezeigt werden.
So fügen Sie eine Spatial Referenz für die Modellplatzierung hinzu:
- Klicken Sie oben in der 3D-Szene auf Add > Model Placement. Die Gizmos erlauben nur Bewegungen entlang der grünen und roten Achse und eine Drehung um die blaue Achse. Diese Einschränkung dient dazu, die Model Placement-Referenz auf derselben Ebene zu halten.
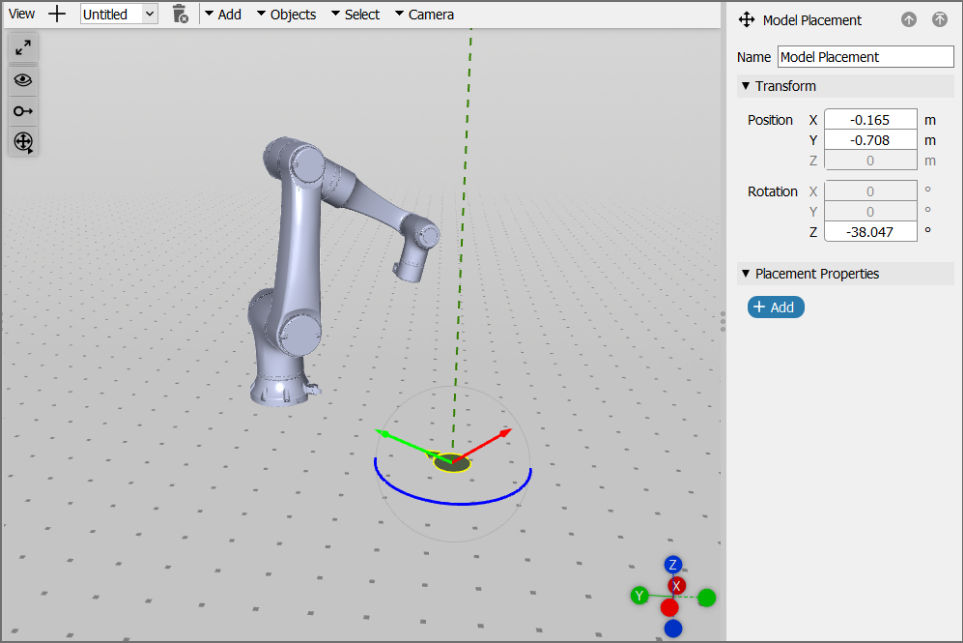
2. Der grüne Pfeil symbolisiert die Blickrichtung des Benutzers. Der Benutzer kann im Menü auf der rechten Seite auswählen, welche Modelle entsprechend dieser Referenz positioniert werden. Beim Starten des Workflows in Spatial Workplace werden die ausgewählten Modelle und verbundenen Pins in Bezug auf die Blickrichtung des Benutzers positioniert, wenn dieser die Spatial Workplace-App startet.
Model visibility: Im Gegensatz zu den Pins, die mit einer Spatial Referenz verbunden sind, sind Modelle standardmäßig nicht sichtbar. Um sie während der Wiedergabe des Workflows sichtbar zu machen, müssen Sie entweder:
Tracking-Empfehlungen
Größe der Marker
Die Größe des Markers kann die Genauigkeit beeinflussen, mit der Informationen in Spatial Workplace angezeigt werden, und auch die Entfernung, aus der der Marker gescannt werden kann. Der Editor ermöglicht es dem Benutzer, eine Markergröße zwischen 1 und 99 cm zu wählen.
Hinweis: Im Allgemeinen beträgt die empfohlene Mindestgröße für einen Marker 10 cm. Dies kann jedoch je nach Lichtverhältnissen, Kamerafokus und Entfernung von der Scannerkamera variieren.
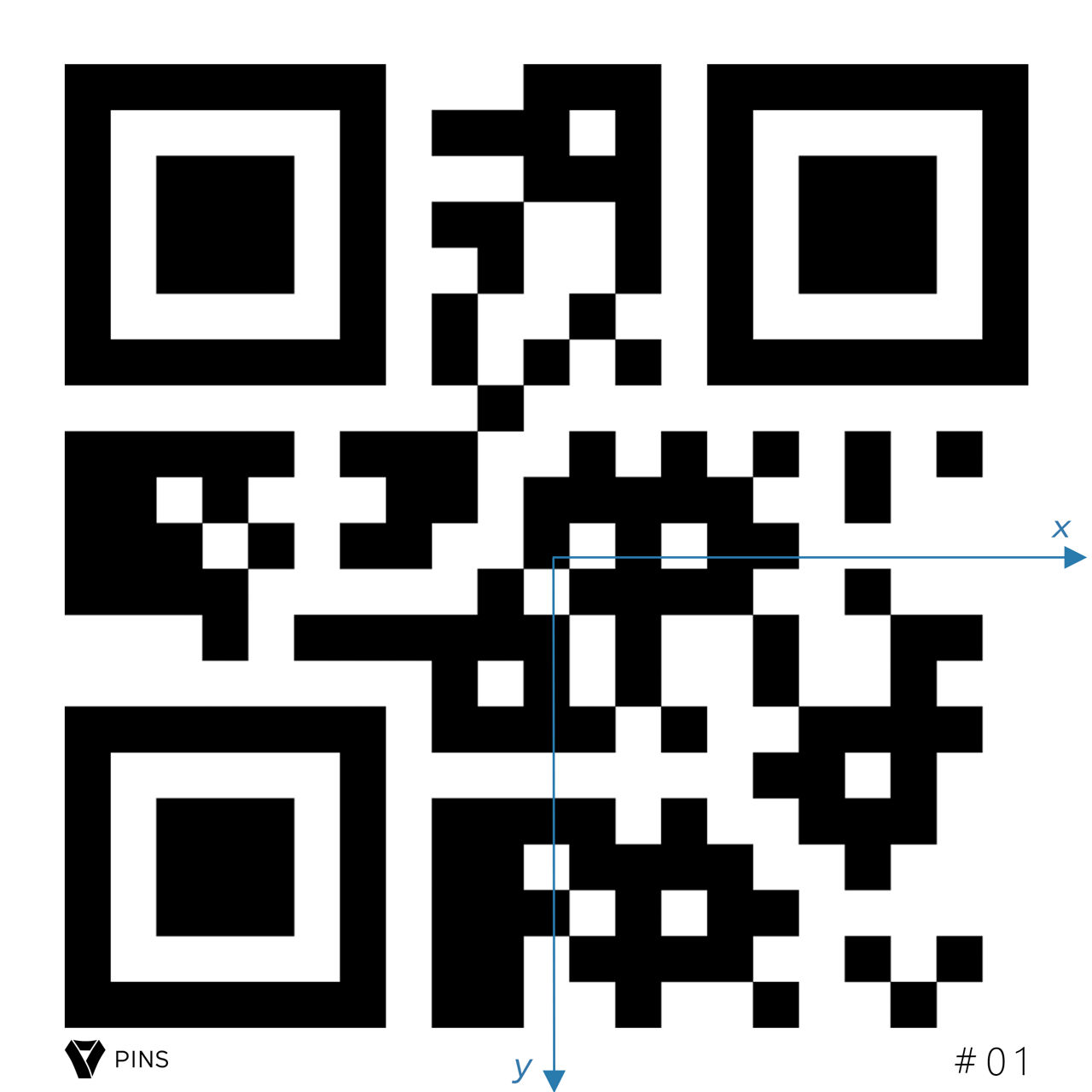
Spatial Workplace positioniert den Inhalt eines Workflows in Bezug auf den gescannten Marker.
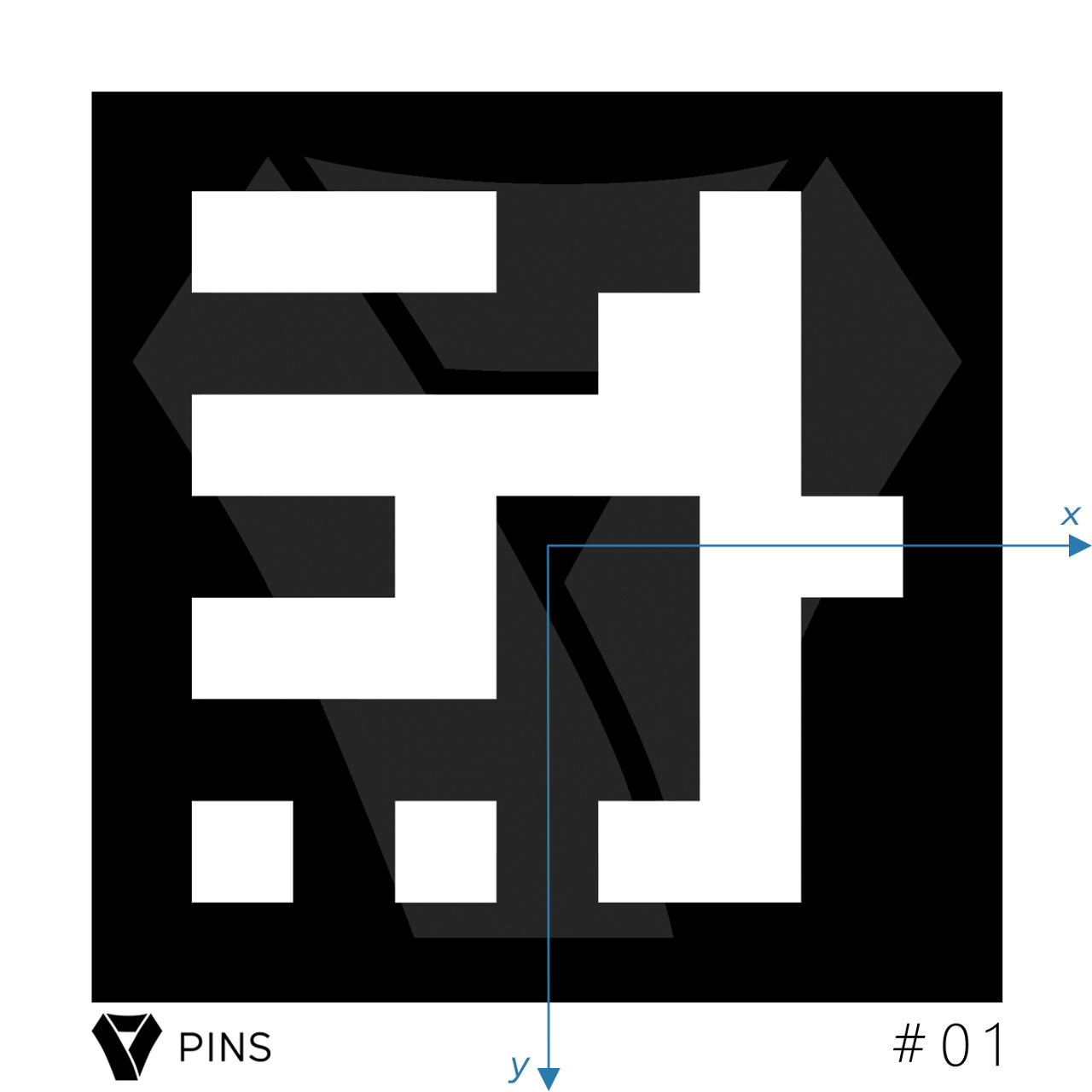
Nur die x- und y-Achsen werden in dieser 2D-Darstellung angezeigt. Spatial Workplace verwendet jedoch auch die dritte Achse, um die exakte 3D-Position abzubilden. Die Software nutzt dabei das Zentrum des Markers in Relation zu dessen Höhe und Breite, um eine 3D-Transformation zu bestimmen.
Wird ein Marker auf einem realen Bauteil platziert, das eine andere Größe hat als das digitale Modell, das im Editor dem Workflow hinzugefügt wurde, besteht die Gefahr, dass der Startpunkt dieses räumlichen Koordinatensystems an einer falschen Stelle gesetzt wird. Dadurch kann die Positionierung sämtlicher Informationen im Workflow beeinträchtigt werden.
Faustregel: Eine Größe von 10 cm für ArUco-Marker ist in den meisten Fällen auf den jeweiligen Geräten ausreichend. Allerdings können Lichtverhältnisse, Kamerafokus und der Abstand zur Scannerkamera einen erheblichen Einfluss haben. Falls Probleme auftreten, sollten Sie die Markergröße erhöhen.
Hinweis: Die Scannerkamera muss alle vier Ecken des Markers klar erkennen können. Der Marker muss exakt an der im Editor definierten Position flach angebracht werden. Falten oder Knicke im Marker können die korrekte Positionierung von Pins beeinträchtigen.
Empfehlungen für reale Umgebungen
Die Berücksichtigung aller Tracking-Variablen ist entscheidend, um Pins exakt zu positionieren und Abweichungen zu minimieren. Dazu gehören die physikalischen Eigenschaften des Markers, die Umgebungsbedingungen sowie das verwendete Gerät für die Ausführung der Spatial-Workplace-App. Mit den folgenden Empfehlungen lässt sich die Tracking-Effizienz deutlich steigern.
Marker-Bedingungen
-
Verwenden Sie Marker mit der korrekten Größe und ID-Nummer, wie im Editor definiert.
-
Alle vier Ecken des Markers müssen für die Scannerkamera klar sichtbar sein, einschließlich des weißen Randbereichs.
-
Marker müssen flach und exakt positioniert auf dem realen Objekt angebracht werden – ohne Falten, Risse oder Knicke.
-
Reflektierende Oberflächen über dem Marker (z. B. Glas oder Laminierung) können das Tracking beeinträchtigen.
-
Marker sollten in einem 90-Grad-Winkel zur Oberfläche gescannt werden, also direkt von vorne. Schräges Scannen kann die Pin-Positionierung verfälschen.
Umgebungsbedingungen
-
Die Anzahl von Merkmalen in der Umgebung und am Bauteil selbst beeinflusst das Tracking. Nach dem Scannen des Markers übernimmt das Gerätetracking die Aufgabe, die Inhalte an Ort und Stelle zu halten. Mehr visuelle Merkmale (z. B. Kanten, Kontraste) verbessern die Stabilität.
-
Gute Beleuchtung ist erforderlich, da Kameras weniger lichtempfindlich sind als das menschliche Auge. Achten Sie auf ausreichend Licht, vermeiden Sie jedoch zu helle Umgebungen.
-
Reflektierende Oberflächen vermeiden, insbesondere an Stellen, wo Marker, Pins oder Inhalte platziert werden.
-
Ruckartige Bewegungen während der Ausführung können Drifts verursachen. Halten Sie das Gerät möglichst stabil.
-
In großen Szenen gilt: Je weiter ein Pin vom gescannten Marker entfernt ist, desto größer die Wahrscheinlichkeit von Drifts. Ursache sind kleine Ungenauigkeiten beim Marker-Tracking und die zusätzliche Bewegung. Um dies zu minimieren, sollten ggf. zusätzliche Marker gesetzt werden.
Geräte-Bedingungen
-
iOS- und Android-Geräte: Saubere Kameraobjektive sind essenziell für korrektes Tracking.
-
Autofokus kann die Pin-Positionierung beeinträchtigen.
Soll ich dir die zusätzlichen Empfehlungen zur Nutzung mehrerer Marker zur Drift-Reduzierung gleich noch mitübersetzen und aufbereiten?
Das Tracking während eines Tasks neu starten
Wenn die Position Ihres Inhalts während der Ausführung einer Aufgabe verschoben wird, scannen Sie einfach eine Markierung erneut. Wählen Sie Aufgabe neu positionieren im Aufgabenmenü des Geräts und scannen Sie die Markierung wie aufgefordert. Nach dem erneuten Scannen des Markers wird die Aufgabe genau dort fortgesetzt, wo Sie aufgehört haben.
Task menu
Auf mobilen Geräten (iOS und Android) bleibt das Task menu immer in der oberen linken Ecke des Bildschirms mit einem Symbol mit drei Zeilen. Es ist auch möglich, das Tracking mit dem Sprachbefehl Reposition Task neu zu starten.
Zusätzliche Marker zur Verbesserung des Trackings
AR-Geräte verfügen über eine bessere Tracking-Fähigkeit, wenn sich alle Pins näher an der Spatial-Referenz (Marker) befinden und der Benutzer sich nicht weit entfernen oder große Drehbewegungen in Bezug auf die ursprüngliche Position ausführen muss.
Wenn sich Inhalte weit von der ursprünglichen Spatial-Referenz entfernt befinden, erscheinen kleine Tracking-Ungenauigkeiten aus dem Markerscan größer, da sie durch die Entfernung verstärkt werden. Darüber hinaus können übermäßige Bewegungen des Benutzers zusätzliche Drifts in der Position der Inhalte verursachen. Aus diesem Grund empfehlen wir, verschiedene Marker für unterschiedliche „Sektionen“ des realen Bauteils zu erstellen, wie in diesem Beispiel gezeigt:
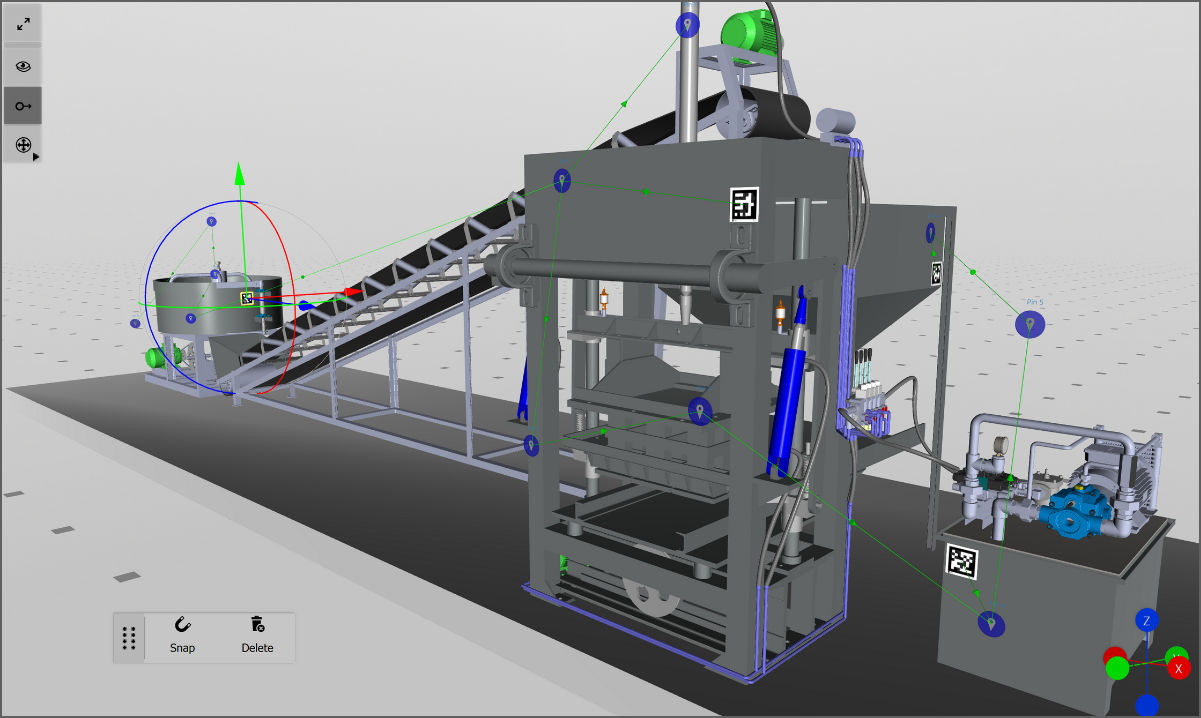
Während einer Aufgabenausführung kann der Benutzer neue Marker in jedem Abschnitt der Komponente scannen, und das Gerät kann die Positionen der Inhalte neu laden und die Pins an den richtigen Positionen platzieren. Weitere Informationen finden Sie im Abschnitt „Das Tracking während eines Tasks neu starten“ oben.
Wenn Sie mehr als einen Marker zu einem Projekt im Editor hinzufügen, stellen Sie sicher, dass die zusätzlichen Marker mit den Pins im Workflow verbunden sind. Im Editor kann der Benutzer sie im 2D-Konnektor verbinden. Auf diese Weise kann der Benutzer entscheiden, ob verschiedene Marker die Aufgabe von unterschiedlichen Pins aus starten können oder ob die Marker zwischen den Pins hinzugefügt werden, wodurch der Benutzer gezwungen wird, diesen Marker zu scannen, wenn er diesen Teil der Aufgabe erreicht.
Sie können unterschiedliche Marker-IDs oder dieselbe Marker-ID für diese zusätzlichen Marker verwenden.
Zusätzliche Empfehlungen
Bitte berücksichtigen Sie die folgenden Elemente, um ein nahtloses AR-Tracking-Erlebnis sicherzustellen, die Tracking-Qualität zu verbessern und Probleme wie AR-Schwimmen und falsche Positionierung zu verhindern:
-
Sehr wenige optische Merkmale in der realen Umgebung: Wenn die reale Umgebung nicht viele optische Merkmale enthält (z. B. eine schlichte weiße Wand mit Textur), kann es für die Kameras schwierig sein, die Bewegungen des Headsets oder mobilen Geräts zu berechnen.
-
Sehr komplexe 3D-Modelle/Hologramme: Bei der Visualisierung komplexer Modelle oder Hologramme ist hohe Rechenleistung erforderlich, damit alle Objekte/Teile sichtbar sind. Das bedeutet, dass weniger Rechenleistung für das AR-Tracking-System übrig bleibt.
-
Mobiles Gerät mit eingeschränkter Rechenleistung: Wenn das Gerät, mit dem Sie Spatial Workplace ausführen, nicht über ausreichende Rechenleistung verfügt, kann es sein, dass das AR-Tracking-Erlebnis nicht flüssig ist.
-
Niedrigwertige Kamera des mobilen Geräts: Schlechte Tracking-Qualität kann auch auftreten, wenn die Kameraqualität Ihres Geräts gering ist.
-
Falsche Markergrößen: Marker müssen exakt in der Größe ausgedruckt werden, die im Marker-PDF angegeben ist. Falsche Markergrößen führen zu falschem Positionstracking, da die Kamera beispielsweise annimmt, dass sich der Marker weiter entfernt befindet, wenn er kleiner ausgedruckt wurde.
-
Große Distanzen gehen/Viele Drehungen: Es ist möglich, dass Hologramme und Pins falsch platziert werden, wenn der Benutzer mit dem Gerät große Distanzen zurücklegt, während die Frontline Spatial App ausgeführt wird, oder wenn der Workflow viele 90-Grad-Drehungen erfordert. Eine mögliche Lösung könnte sein, Marker in der Mitte des Workflows hinzuzufügen, um das AR-Tracking/die Positionen der Pins zurückzusetzen.
-
Falsche Platzierung des Markers in der realen Welt: Es ist wichtig, dass der Marker exakt an der gleichen Position in der realen Welt angebracht/aufgeklebt wird, wie er in der virtuellen Szene innerhalb des Spatial Editors definiert wurde. Dies hilft bei der korrekten Platzierung von Objekten und beim Tracking. Stellen Sie daher sicher, dass die reale Position des Markers mit der im Spatial Editor übereinstimmt.
-
Schwaches mobiles Gerät: Wenn das Gerät, mit dem Sie Spatial Workplace ausführen, nicht über ausreichende Rechenleistung verfügt, kann es sein, dass das AR-Tracking-Erlebnis nicht flüssig ist.